Phần I
GIỚI THIỆU TỔNG QUAN VỀ SONAR
1.1. Định nghĩa và bản chất của SONAR
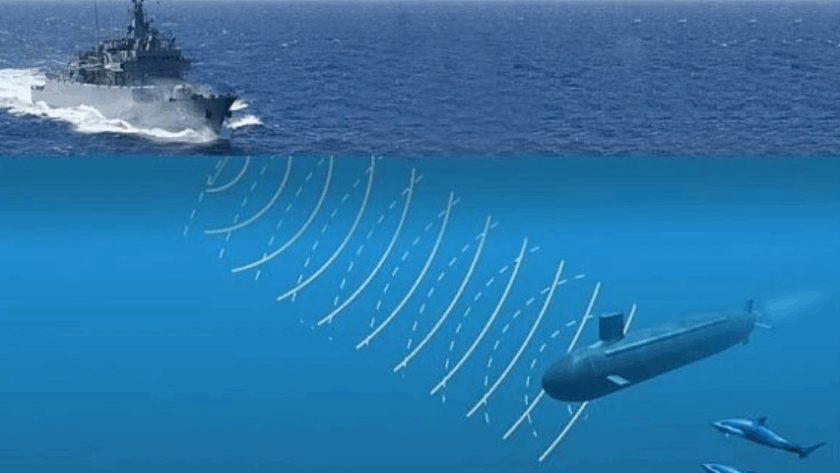
SONAR, một từ viết tắt của cụm từ tiếng Anh SOund Navigation And Ranging, là một công nghệ nền tảng sử dụng nguyên lý lan truyền sóng âm để thực hiện các nhiệm vụ đa dạng như điều hướng, đo đạc khoảng cách, liên lạc và phát hiện các vật thể trên hoặc dưới bề mặt nước. Về cơ bản, kỹ thuật này hoạt động dựa trên hai phương thức chính: phát ra một xung âm thanh và sau đó thu nhận, phân tích tín hiệu phản xạ (tiếng vọng) từ mục tiêu, hoặc lắng nghe một cách thụ động các nguồn âm do chính mục tiêu tạo ra. Mặc dù ban đầu thường được biết đến với vai trò phát hiện tàu ngầm, định nghĩa hiện đại của SONAR bao hàm một phổ chức năng rộng lớn hơn nhiều, bao gồm định vị (navigation), đo lường (ranging) và truyền thông (communication).
Sự ra đời và thống trị của công nghệ SONAR trong môi trường dưới nước bắt nguồn từ một thực tế vật lý cơ bản: môi trường nước là một rào cản gần như không thể xuyên thủng đối với sóng điện từ. Các loại sóng như ánh sáng, vi sóng hay sóng radio bị nước hấp thụ và suy giảm cực kỳ nhanh chóng, khiến cho các công nghệ dựa trên chúng, như RADAR, trở nên kém hiệu quả khi hoạt động dưới mặt biển. Ngược lại, sóng âm lại có khả năng lan truyền trong nước một cách hiệu quả hơn đáng kể, với tốc độ trung bình khoảng 1500 m/s. Do đó, để “quan sát” và tương tác trong môi trường nước mờ đục, con người buộc phải chuyển đổi từ phương thức dựa trên ánh sáng sang một giải pháp công nghệ dựa trên âm thanh.
Bản chất của SONAR chính là biến môi trường nước, vốn không thể nhìn xuyên qua bằng mắt thường hay sóng điện từ, trở nên “trong suốt” đối với sóng âm. Điều này hàm ý rằng mọi khía cạnh của công nghệ SONAR, từ thiết kế phần cứng, vật liệu chế tạo cho đến các thuật toán xử lý tín hiệu phức tạp, đều được tối ưu hóa một cách đặc thù cho các đặc tính độc nhất của sự lan truyền âm thanh trong môi trường nước. Vì vậy, trong khi RADAR được xem là công nghệ thống trị trong không khí, SONAR chính là “ông vua dưới nước”, một công cụ không thể thay thế cho các hoạt động quân sự, dân sự và khoa học trong lòng đại dương.
1.2. Lịch sử hình thành và phát triển
Khái niệm về việc sử dụng âm thanh dưới nước đã có từ lâu, nhưng công nghệ SONAR hiện đại thực sự được định hình và phát triển mạnh mẽ trong thế kỷ XX, chủ yếu được thúc đẩy bởi các nhu cầu cấp thiết của quân sự. Lịch sử của SONAR gắn liền với cuộc đối đầu chiến lược trên biển, đặc biệt là trong lĩnh vực tác chiến chống ngầm.
Những nỗ lực ban đầu tập trung vào các thiết bị lắng nghe thụ động. Một trong những thiết bị sơ khai là một ống nghe với một màng mỏng ở đầu ngâm dưới nước, cho phép người quan sát nghe ngóng âm thanh từ xa. Tuy nhiên, bước ngoặt lớn đến trong và sau Thế chiến I, khi mối đe dọa từ tàu ngầm U-boat của Đức trở nên nghiêm trọng. Các nhà khoa học Anh đã phát triển một hệ thống gọi là ASDIC (Allied Submarine Detection Investigation Committee), được coi là tiền thân trực tiếp của SONAR chủ động. Cùng thời điểm đó, Hải quân Hoa Kỳ cũng đạt được những tiến bộ quan trọng, với việc phát triển thành công máy đo sâu hồi âm đầu tiên vào năm 1919, một ứng dụng cơ bản nhưng quan trọng của nguyên lý SONAR.
Sự phát triển của ngành điện tử trong những năm 1920 đã mở đường cho các hệ thống SONAR phức tạp và hiệu quả hơn. Trong Thế chiến II, SONAR đã trở thành một công cụ then chốt, đóng vai trò quyết định trong các trận hải chiến và trong cuộc chiến bảo vệ các đoàn tàu vận tải Đồng minh khỏi các cuộc tấn công của tàu ngầm.
Lịch sử của SONAR là một ví dụ điển hình về sự chuyển giao công nghệ lưỡng dụng (dual-use technology). Một công nghệ được sinh ra từ nhu cầu quân sự đã dần được dân sự hóa và trở thành một công cụ không thể thiếu trong nhiều lĩnh vực khác. Quá trình này diễn ra một cách tự nhiên: khi công nghệ trưởng thành, hiệu suất tăng và chi phí sản xuất giảm, các ứng dụng dân sự bắt đầu xuất hiện. Nguyên lý đo sâu để tàu chiến tránh va vào đáy biển được điều chỉnh để lập bản đồ hải đồ cho tàu thương mại. Nguyên lý phát hiện một vật thể kim loại lớn như tàu ngầm được tinh chỉnh để phát hiện các tập hợp vật thể sinh học nhỏ hơn như đàn cá, tạo ra một cuộc cách mạng trong ngành thủy sản. Sự chuyển giao này không chỉ là một chiều. Nhu cầu về độ phân giải cực cao trong các ứng dụng khoa học như khảo sát địa chất biển hay khảo cổ học dưới nước đã thúc đẩy sự phát triển của các bộ xử lý tín hiệu và đầu dò tiên tiến. Những tiến bộ này sau đó lại được quân sự hóa, ứng dụng trong các nhiệm vụ đòi hỏi độ chính xác cao như dò mìn hoặc nhận dạng mục tiêu chi tiết.
Phần II
NỀN TẢNG VẬT LÝ CỦA SONAR
2.1. Sự lan truyền sóng âm trong môi trường nước
Nguyên lý hoạt động của SONAR được xây dựng dựa trên các định luật vật lý cơ bản về sự lan truyền của sóng âm trong môi trường chất lỏng. Âm thanh, về bản chất, là một sóng cơ học lan truyền dưới dạng các dao động áp suất. Khi sóng âm lan truyền trong nước và gặp phải một vật thể hoặc một ranh giới giữa hai môi trường có trở kháng sóng khác nhau, một phần năng lượng của sóng sẽ bị phản xạ trở lại. Trở kháng sóng, ký hiệu là Z (hoặc ρ trong một số tài liệu), được định nghĩa là tích của mật độ môi trường (σ) và vận tốc truyền sóng trong môi trường đó (V), tức là Z = σV. Sự khác biệt về trở kháng sóng càng lớn, thì mức độ phản xạ càng mạnh. Đây chính là nguyên nhân tại sao SONAR có thể phát hiện được vỏ tàu ngầm bằng kim loại, đáy biển bằng đá, hoặc thậm chí là một đàn cá (có mật độ khác với nước xung quanh).
Đối với SONAR chủ động, nguyên lý này được khai thác một cách triệt để. Hệ thống phát ra một xung âm thanh, thường được gọi là “ping”, và sau đó chuyển sang chế độ lắng nghe. Bằng cách đo chính xác khoảng thời gian (t) từ lúc phát xung cho đến khi nhận được tín hiệu vọng lại (“echo”), hệ thống có thể tính toán được khoảng cách (d) đến vật thể thông qua công thức đơn giản: d = 2v.t
Trong đó, v là vận tốc của âm thanh trong nước. Quãng đường được chia cho 2 vì sóng âm phải di chuyển một hành trình khứ hồi: từ nguồn phát đến mục tiêu và từ mục tiêu trở về bộ thu.
Tuy nhiên, sự lan truyền của âm thanh trong nước không đơn giản như trong một môi trường đồng nhất. Sóng âm không truyền đi theo một đường thẳng hoàn hảo mà có xu hướng lan tỏa ra theo mọi hướng, thường tạo thành một chùm tia có dạng hình nón. Điều này, một mặt, đảm bảo rằng một phần năng lượng âm sẽ luôn có khả năng phản xạ trở lại máy thu ngay cả khi mục tiêu không nằm vuông góc tuyệt đối với hướng phát. Mặt khác, môi trường đại dương là một môi trường cực kỳ phức tạp và không đồng nhất. Các hiện tượng vật lý như khúc xạ, suy giảm và tán xạ ảnh hưởng sâu sắc đến đường đi và cường độ của sóng âm. Đặc biệt, sự tồn tại của các lớp nước có nhiệt độ khác nhau, được gọi là các đường đẳng nhiệt (thermocline), có thể bẻ cong đường đi của tia âm một cách đáng kể, tạo ra các “vùng tối âm thanh” (acoustic shadow zones) nơi mà hệ thống SONAR gần như bị “mù”.
Do đó, hiệu suất của một hệ thống SONAR không chỉ phụ thuộc vào chất lượng của bản thân thiết bị mà còn phụ thuộc rất lớn vào kiến thức hải dương học và khả năng mô hình hóa môi trường truyền âm. Một người vận hành SONAR chuyên nghiệp không chỉ là một kỹ thuật viên mà còn phải là một nhà hải dương học thực hành, người có khả năng diễn giải chính xác các tín hiệu nhận được, phân biệt giữa một mục tiêu thực sự và một “ảo ảnh âm thanh” (acoustic artifact) do các điều kiện môi trường phức tạp tạo ra.
2.2. Vận tốc âm thanh và các yếu tố ảnh hưởng
Như đã đề cập trong công thức tính khoảng cách, vận tốc âm thanh (v) là một tham số cực kỳ quan trọng. Tuy nhiên, không giống như tốc độ ánh sáng trong chân không là một hằng số, vận tốc âm thanh trong nước biển thay đổi liên tục và phụ thuộc vào ba yếu tố chính của môi trường: nhiệt độ, áp suất (tương ứng với độ sâu), và độ mặn. Giá trị của nó thường dao động trong khoảng từ 1450 m/s đến 1500 m/s.
Sự phụ thuộc này có thể được tóm tắt như sau:
– Nhiệt độ: Đây là yếu tố có ảnh hưởng lớn nhất. Khi nhiệt độ của nước tăng lên, các phân tử nước chuyển động nhanh hơn, làm cho sóng âm truyền đi nhanh hơn. Do đó, vận tốc âm thanh tỷ lệ thuận với nhiệt độ.
– Áp suất (độ sâu): Khi độ sâu tăng, áp suất thủy tĩnh cũng tăng theo. Áp suất cao hơn làm cho các phân tử nước bị nén lại gần nhau hơn, tăng độ cứng thể tích của môi trường và do đó làm tăng vận tốc âm thanh. Mặc dù ảnh hưởng không lớn bằng nhiệt độ, áp suất vẫn là một yếu tố quan trọng.
– Độ mặn: Độ mặn của nước biển cũng ảnh hưởng đến vận tốc âm thanh. Nước càng mặn, mật độ càng cao, và vận tốc âm thanh cũng tăng theo. Tuy nhiên, so với nhiệt độ và áp suất, ảnh hưởng của độ mặn thường ít đáng kể hơn trong hầu hết các trường hợp.
Sự thay đổi của ba yếu tố này theo chiều sâu tạo ra một “cấu hình vận tốc âm thanh” SVP (Sound Velocity Profile) đặc trưng cho từng khu vực biển tại một thời điểm nhất định. Việc đo đạc chính xác SVP bằng các thiết bị chuyên dụng (gọi là máy đo vận tốc âm thanh hoặc máy đo CTD – Conductivity, Temperature, Depth) là một bước không thể thiếu trong các hoạt động khảo sát biển chính xác hoặc tác chiến hải quân. Việc hiểu rõ SVP cho phép các nhà khoa học và kỹ sư dự đoán chính xác đường đi cong của tia âm do hiện tượng khúc xạ, từ đó hiệu chỉnh lại các phép đo độ sâu và khoảng cách, đảm bảo tính chính xác của dữ liệu thu thập được.
Bảng 1: Các yếu tố ảnh hưởng đến vận tốc âm thanh trong nước
| Yếu tố | Tác động lên vận tốc âm thanh | Mức độ ảnh hưởng | Hệ quả và ghi chú |
| Nhiệt độ | Tỷ lệ thuận (Nhiệt độ tăng, vận tốc tăng) | Cao nhất | Là nguyên nhân chính gây ra hiện tượng khúc xạ và hình thành các lớp thermocline, tạo ra các kênh âm thanh và vùng tối.8 |
| Áp suất (Độ sâu) | Tỷ lệ thuận (Áp suất tăng, vận tốc tăng) | Trung bình | Ảnh hưởng trở nên đáng kể ở các độ sâu lớn. Vận tốc tăng khoảng 1,7 m/s cho mỗi 100 m độ sâu tăng thêm. |
| Độ mặn | Tỷ lệ thuận (Độ mặn tăng, vận tốc tăng) | Thấp | Ảnh hưởng chủ yếu ở các vùng cửa sông hoặc nơi có sự pha trộn giữa nước ngọt và nước mặn. Vận tốc tăng khoảng 1,3 m/s cho mỗi 1 phần nghìn độ mặn tăng thêm. |
2.3. Hiệu ứng Doppler trong SONAR
Hiệu ứng Doppler là một hiện tượng vật lý mô tả sự thay đổi tần số biểu kiến của một sóng khi có sự chuyển động tương đối giữa nguồn phát sóng và người quan sát. Một ví dụ quen thuộc trong đời sống là tiếng còi của một chiếc xe cứu thương: khi xe tiến lại gần, âm thanh nghe cao hơn (tần số cao hơn), và khi xe đi ra xa, âm thanh nghe trầm hơn (tần số thấp hơn).
Trong công nghệ SONAR, hiệu ứng Doppler cung cấp một chiều thông tin vô giá: vận tốc. Khi một hệ thống SONAR chủ động phát ra một xung âm thanh có tần số f, nếu mục tiêu đang đứng yên, tín hiệu vọng lại cũng sẽ có tần số f. Tuy nhiên:
– Nếu mục tiêu đang di chuyển về phía hệ thống SONAR, các mặt sóng phản xạ sẽ bị “nén” lại, làm cho tần số của tín hiệu vọng lại (f′) cao hơn tần số phát đi (f′ > f).
– Nếu mục tiêu đang di chuyển ra xa khỏi hệ thống SONAR, các mặt sóng phản xạ sẽ bị “giãn” ra, làm cho tần số của tín hiệu vọng lại (f′) thấp hơn tần số phát đi (f′ < f).
Bằng cách đo lường chính xác sự chênh lệch tần số này (gọi là độ dịch chuyển Doppler), hệ thống có thể tính toán được thành phần vận tốc của mục tiêu theo phương nhìn. Ứng dụng này cực kỳ quan trọng trong nhiều lĩnh vực. Trong quân sự, nó không chỉ giúp xác định một vật thể đang di chuyển hay đứng yên mà còn cung cấp thông tin động học quan trọng cho việc bám bắt mục tiêu và điều khiển vũ khí. Trong lĩnh vực dân sự, các thiết bị chuyên dụng như Doppler Velocity Log (DVL) sử dụng nguyên lý này, phát các chùm tia âm thanh xuống đáy biển để đo chính xác vận tốc của tàu hoặc phương tiện tự hành dưới nước (AUV) so với đáy biển, cho phép định vị và điều hướng với độ chính xác cao mà không cần đến tín hiệu GPS (vốn không hoạt động dưới nước).
Về bản chất, hiệu ứng Doppler đã bổ sung một “giác quan” mới cho SONAR. Nó biến công nghệ này từ một công cụ chỉ có khả năng “chụp ảnh tĩnh” (cho biết vị trí của vật thể tại một thời điểm) thành một công cụ “quay phim động” (cho phép theo dõi và dự đoán hành vi, quỹ đạo của vật thể). Thông tin về việc một tàu ngầm đối phương đang tiến lại gần hay đang rút lui, hay một đàn cá đang di chuyển theo hướng nào, là những dữ liệu mang tính chiến thuật và kinh tế cao, và chúng được cung cấp bởi chính nguyên lý Doppler.
2.4. Phương trình SONAR
Để đánh giá và dự đoán hiệu suất của một hệ thống SONAR trong các điều kiện cụ thể, các kỹ sư và nhà khoa học sử dụng một công cụ toán học gọi là Phương trình SONAR. Phương trình này định lượng hóa mối quan hệ giữa các yếu tố khác nhau ảnh hưởng đến khả năng phát hiện mục tiêu, thường được biểu diễn dưới dạng Tỷ lệ tín hiệu trên nhiễu SNR (Signal-to-Noise Ratio) tại bộ thu. Một tín hiệu chỉ có thể được phát hiện một cách đáng tin cậy nếu SNR vượt qua một ngưỡng nhất định.
Có hai dạng chính của phương trình SONAR, tương ứng với hai chế độ hoạt động:
1. Phương trình SONAR chủ động:
SNR = SL – 2TL + TS – (NL – AG)
2. Phương trình SONAR bị động:
SNR = SL – TL – (NL – AG)
Các thành phần trong phương trình (thường được đo bằng đơn vị decibel – dB) được giải thích như sau:
– SL (Source Level – Mức nguồn): Cường độ của xung âm thanh do hệ thống phát ra, được đo ở khoảng cách 1 mét từ nguồn phát.
– TL (Transmission Loss – Suy hao truyền sóng): Sự mất mát năng lượng âm thanh khi nó lan truyền từ nguồn đến mục tiêu. Trong SONAR chủ động, sóng âm phải đi một hành trình khứ hồi, do đó suy hao được tính hai lần (2TL).
– TS (Target Strength – Sức bền mục tiêu): Một đại lượng đo lường mức độ một mục tiêu phản xạ lại năng lượng âm thanh. Nó phụ thuộc vào kích thước, hình dạng, vật liệu và góc tới của mục tiêu.
– NL (Noise Level – Mức nhiễu): Mức độ của tiếng ồn nền trong môi trường biển. Tiếng ồn này có thể đến từ nhiều nguồn: hoạt động của tàu bè, tiếng ồn sinh học (tôm, cá voi), sóng, gió, và cả tiếng ồn do chính con tàu mang hệ thống SONAR tạo ra.
– AG (Array Gain – Độ lợi mảng): Khả năng của một mảng đầu thu (gồm nhiều hydrophone) trong việc tăng cường tín hiệu đến từ một hướng cụ thể trong khi làm suy yếu tiếng ồn đến từ các hướng khác.
Phương trình SONAR cho thấy cuộc chiến công nghệ trong lĩnh vực này là một cuộc chiến không ngừng chống lại sự suy hao và nhiễu loạn. Để tăng khả năng phát hiện (tức là tăng SNR), các nhà thiết kế phải tìm cách: tăng SL (phát mạnh hơn), giảm TL (ví dụ, sử dụng tần số thấp hơn vì chúng suy hao ít hơn), giảm NL (lọc nhiễu tốt hơn), hoặc tăng AG (sử dụng các mảng hydrophone lớn và phức tạp hơn). Tuy nhiên, mỗi giải pháp đều đi kèm với sự đánh đổi. Ví dụ, việc tăng công suất phát (SL) quá mức có thể dẫn đến hiện tượng cavitation, tức là sự hình thành các bong bóng khí xung quanh đầu phát do áp suất âm quá lớn. Các bong bóng này không chỉ làm giảm hiệu quả truyền năng lượng vào nước mà còn có thể gây hư hại vật lý cho đầu dò. Tương tự, sử dụng tần số thấp để giảm TL sẽ làm giảm độ phân giải của hệ thống và đòi hỏi các đầu dò có kích thước lớn hơn. Do đó, thiết kế một hệ thống SONAR không phải là việc tối đa hóa một tham số duy nhất, mà là một quá trình tối ưu hóa đa biến phức tạp, cân bằng giữa hiệu suất, chi phí, kích thước và các ràng buộc vật lý, được định hướng bởi chính phương trình SONAR.
Phần III
KIẾN TRÚC HỆ THỐNG VÀ CÔNG NGHỆ CỐT LÕI
Một hệ thống SONAR, dù phức tạp đến đâu, đều được cấu thành từ một tập hợp các khối chức năng cơ bản, phối hợp với nhau để phát, thu và xử lý sóng âm.
3.1. Các thành phần cấu tạo chính
Một hệ thống SONAR điển hình, đặc biệt là SONAR chủ động, bao gồm các thành phần chính sau đây:
– Bộ phát (Transmitter/Projector): Đây là bộ phận tạo ra các xung âm thanh. Nó nhận tín hiệu điện từ bộ xử lý, khuếch đại lên công suất lớn và cung cấp cho đầu dò để chuyển đổi thành năng lượng âm thanh.
– Đầu dò (Transducer): Thường được coi là “trái tim” của hệ thống, transducer là một thiết bị có khả năng chuyển đổi năng lượng giữa hai dạng: từ điện sang âm (khi phát) và từ âm sang điện (khi thu). Trong nhiều hệ thống, cùng một transducer được sử dụng cho cả hai chức năng.
– Bộ thu (Receiver/Hydrophone): Hydrophone là một “microphone dưới nước”, được thiết kế đặc biệt để thu nhận các sóng áp suất âm thanh trong nước và chuyển đổi chúng thành các tín hiệu điện yếu. Trong các hệ thống SONAR bị động, đây là thành phần cảm biến duy nhất.
– Bộ xử lý tín hiệu (Processing Unit): Đây là “bộ não” của hệ thống. Nó nhận các tín hiệu điện thô từ bộ thu, thực hiện các thuật toán phức tạp để lọc bỏ nhiễu, khuếch đại tín hiệu hữu ích, và trích xuất các thông tin quan trọng như khoảng cách, phương vị, vận tốc và đặc điểm của mục tiêu.
– Bộ điều khiển và hiển thị (Control & Display Unit): Đây là giao diện giữa người vận hành và hệ thống. Nó cho phép người dùng thiết lập các tham số hoạt động (như tần số, công suất, phạm vi quét) và trực quan hóa các dữ liệu đã được xử lý dưới dạng hình ảnh, biểu đồ hoặc các ký hiệu trên màn hình.
Bảng 2: Các thành phần chính của hệ thống SONAR và chức năng
| Thành phần | Chức năng chính | Công nghệ liên quan |
| Bộ phát (Projector) | Chuyển đổi tín hiệu điện thành sóng âm để phát vào môi trường nước. | Khuếch đại công suất, tạo dạng sóng. |
| Đầu dò (Transducer) | Thiết bị lưỡng dụng, thực hiện chuyển đổi năng lượng điện-âm và âm-điện. | Vật liệu áp điện, thiết kế cơ-âm học. |
| Bộ thu (Hydrophone) | Cảm biến chuyên dụng để thu nhận sóng âm và chuyển đổi thành tín hiệu điện. | Mảng định hướng, tiền khuếch đại. |
| Bộ xử lý tín hiệu | Phân tích, lọc nhiễu và trích xuất thông tin có ý nghĩa từ tín hiệu thô. | Xử lý tín hiệu số (DSP), beamforming, thuật toán phát hiện và phân loại. |
| Bộ hiển thị | Trực quan hóa dữ liệu đã xử lý để người vận hành có thể diễn giải và ra quyết định. | Giao diện người-máy (HMI), đồ họa máy tính. |
3.2. Transducer và Hydrophone: Trái tim của hệ thống
Chức năng cốt lõi của việc phát và thu sóng âm trong hầu hết các hệ thống SONAR hiện đại đều dựa trên hiệu ứng áp điện (piezoelectric effect). Hiệu ứng này mô tả khả năng của một số vật liệu tinh thể hoặc gốm sứ đặc biệt trong việc tạo ra một điện áp khi chúng bị tác động bởi một áp suất cơ học (như sóng âm). Ngược lại, khi một điện áp được đặt vào các vật liệu này, chúng sẽ bị biến dạng về mặt vật lý, tạo ra các dao động cơ học và từ đó phát ra sóng âm vào môi trường xung quanh.
Các thuật ngữ thường được sử dụng để phân biệt các thiết bị này:
– Hydrophone: Là một thiết bị chỉ thu, được tối ưu hóa cho độ nhạy cao để phát hiện các tín hiệu âm thanh yếu nhất có thể.
– Projector: Là một thiết bị chỉ phát, được thiết kế để xử lý công suất lớn và chuyển đổi năng lượng điện thành âm thanh một cách hiệu quả nhất.
– Transducer: Là một thuật ngữ chung hơn, thường chỉ một thiết bị có khả năng thực hiện cả hai chức năng phát và thu.
Sự phát triển của công nghệ SONAR gắn liền với sự tiến bộ trong khoa học vật liệu áp điện. Các vật liệu khác nhau được sử dụng cho các ứng dụng khác nhau. Gốm áp điện (piezo-ceramic), như PZT (Lead Zirconate Titanate), rất phổ biến trong các transducer công suất lớn do hiệu quả chuyển đổi năng lượng cao. Màng mỏng Polyvinylidene fluoride (PVDF) thì linh hoạt và có dải tần rộng, thường được sử dụng trong các hydrophone có độ chính xác cao hoặc các ứng dụng y tế. Các thiết kế cơ học của transducer cũng rất đa dạng, từ thiết kế Tonpilz cổ điển (một loại cấu trúc “bu-lông kẹp” các vòng gốm) cho các ứng dụng tần số trung và cao, đến các transducer uốn dẻo (flextensional) phức tạp được thiết kế để phát ra âm thanh tần số thấp mạnh mẽ, có khả năng truyền đi rất xa.
Những tiến bộ trong vật liệu áp điện là động lực chính thúc đẩy sự phát triển của SONAR. Một vật liệu mới với hiệu suất chuyển đổi năng lượng cao hơn có thể cho phép tạo ra một hệ thống SONAR phát ra tín hiệu mạnh hơn (tăng SL trong phương trình SONAR) hoặc thu nhận tín hiệu yếu hơn (tăng độ nhạy, giúp chống lại mức nhiễu NL). Điều này trực tiếp dẫn đến việc tăng phạm vi phát hiện hoặc cải thiện độ phân giải. Khoa học vật liệu và kỹ thuật SONAR do đó có một mối quan hệ cộng sinh: những đột phá trong vật liệu cho phép tạo ra các hệ thống SONAR nhỏ hơn, hiệu quả hơn và có khả năng hoạt động ở những dải tần mà trước đây không thể tiếp cận.
3.3. Xử lý tín hiệu và hình thành búp sóng (Beamforming)
Thay vì chỉ sử dụng một hydrophone đơn lẻ, các hệ thống SONAR hiện đại hầu như luôn sử dụng một mảng (array) gồm hàng chục, hàng trăm, hoặc thậm chí hàng nghìn hydrophone riêng lẻ được sắp xếp theo một cấu hình hình học nhất định (ví dụ: đường thẳng, hình tròn, hình cầu hoặc tấm phẳng). Việc sử dụng mảng mang lại một lợi thế vượt trội: khả năng định hướng.
Kỹ thuật được sử dụng để đạt được khả năng này được gọi là hình thành búp sóng (beamforming). Nguyên lý của nó là xử lý các tín hiệu nhận được từ mỗi hydrophone trong mảng với một độ trễ thời gian được tính toán cẩn thận trước khi cộng chúng lại với nhau. Bằng cách điều chỉnh các độ trễ này, hệ thống có thể “lái” hướng “nghe” chính của mảng đến một hướng cụ thể mà không cần phải xoay toàn bộ mảng về mặt cơ học. Tín hiệu đến từ hướng mong muốn sẽ được cộng hưởng và khuếch đại, trong khi các tín hiệu và nhiễu đến từ các hướng khác sẽ bị lệch pha và triệt tiêu lẫn nhau. Khả năng này chính là yếu tố tạo ra
Độ lợi mảng AG (Array Gain) trong phương trình SONAR, một tham số quan trọng giúp cải thiện đáng kể tỷ lệ tín hiệu trên nhiễu.
Sự ra đời của beamforming, đặc biệt là beamforming kỹ thuật số, đã tạo ra một cuộc cách mạng cho công nghệ SONAR. Nó giải phóng các hệ thống khỏi những giới hạn của việc quét cơ học, vốn chậm chạp và cồng kềnh. Với sức mạnh của các bộ xử lý tín hiệu số DSP (Digital Signal Processor) hiện đại, một hệ thống SONAR có thể:
– Quét điện tử: Nhanh chóng quét một vùng không gian rộng lớn bằng cách “lái” búp sóng điện tử.
– Tạo đa búp sóng: Hình thành hàng trăm búp sóng riêng biệt cùng một lúc, cho phép quan sát đồng thời nhiều hướng. Đây là nguyên lý của các hệ thống SONAR đa tia (multibeam sonar) dùng để lập bản đồ đáy biển 3D.
– Thích ứng: Tự động điều chỉnh hình dạng của búp sóng để tối ưu hóa việc thu tín hiệu hoặc loại bỏ một nguồn nhiễu cụ thể.
– Áp dụng các bộ lọc phức tạp: Thực hiện các thuật toán lọc tinh vi như “bộ lọc tương hợp” (matched filtering) để phát hiện các tín hiệu cực yếu bị chôn vùi trong nhiễu.
Về cơ bản, sức mạnh của một hệ thống SONAR hiện đại không chỉ nằm ở phần cứng cảm biến được ngâm dưới nước, mà còn nằm ở phần mềm và các thuật toán xử lý tín hiệu mạnh mẽ được thực thi trên tàu.
Phần IV
PHÂN LOẠI CÁC HỆ THỐNG SONAR
Các hệ thống SONAR có thể được phân loại theo nhiều cách khác nhau, nhưng cách phân loại cơ bản và quan trọng nhất là dựa trên phương thức hoạt động: chủ động hoặc bị động.
4.1. SONAR chủ động (Active Sonar)
Nguyên lý: SONAR chủ động hoạt động theo chu trình “phát và nghe” (ping and echo). Hệ thống tự tạo ra một xung năng lượng âm thanh, phát nó vào môi trường nước, và sau đó lắng nghe tiếng vọng phản xạ lại từ các vật thể.
*Ưu điểm:
– Phát hiện toàn diện: Có khả năng phát hiện tất cả các vật thể có sự khác biệt về trở kháng sóng so với nước, bao gồm cả những mục tiêu hoàn toàn im lặng không tự phát ra tiếng ồn.
– Đo khoảng cách chính xác: Vì hệ thống biết chính xác thời điểm phát xung, việc đo thời gian vọng lại cho phép tính toán khoảng cách đến mục tiêu với độ chính xác cao.
*Nhược điểm:
– Bị lộ vị trí: Đây là nhược điểm chí mạng, đặc biệt trong các ứng dụng quân sự. Việc phát ra một “ping” giống như bật một chiếc đèn pin sáng rực trong một căn phòng tối. Bất kỳ đối phương nào trong khu vực có trang bị SONAR bị động đều có thể ngay lập tức phát hiện ra vị trí của nguồn phát.
– Nhiễu dội (Reverberation): Hệ thống không chỉ nhận được tiếng vọng từ mục tiêu mong muốn mà còn từ vô số các vật thể khác như đáy biển, bề mặt biển, bọt khí, và các sinh vật biển. Toàn bộ tiếng vọng không mong muốn này tạo thành một loại nhiễu gọi là nhiễu dội, có thể che lấp tín hiệu yếu ớt từ mục tiêu thực sự.
Cấu hình hoạt động: SONAR chủ động có thể được triển khai theo nhiều cấu hình hình học khác nhau để tối ưu hóa cho các nhiệm vụ cụ thể:
– Đơn tĩnh (Monostatic): Bộ phát và bộ thu được đặt cùng một vị trí (ví dụ, trên cùng một con tàu). Đây là cấu hình phổ biến nhất.
– Song tĩnh (Bistatic): Bộ phát và bộ thu được đặt ở hai vị trí tách biệt. Ví dụ, một máy bay thả phao âm thanh (sonobuoy) để phát “ping”, trong khi một tàu ngầm ở gần đó im lặng lắng nghe tiếng vọng.
– Đa tĩnh (Multistatic): Sử dụng nhiều bộ phát và/hoặc nhiều bộ thu ở các vị trí khác nhau, tạo ra một mạng lưới phát hiện phức tạp và khó bị đối phó hơn.
4.2. SONAR thụ động (Passive Sonar)
Nguyên lý: SONAR thụ động không tự phát ra bất kỳ năng lượng âm thanh nào. Thay vào đó, nó hoạt động như một hệ thống “siêu thính giác”, chỉ chuyên tâm lắng nghe các âm thanh do các nguồn khác trong môi trường tạo ra, đặc biệt là tiếng ồn từ hoạt động của tàu thuyền (như tiếng động cơ, tiếng chân vịt quay, tiếng máy móc phụ).
*Ưu điểm:
Hoàn toàn bí mật: Vì không phát ra tín hiệu, SONAR bị động cho phép phương tiện mang nó (đặc biệt là tàu ngầm) hoạt động một cách tàng hình, quan sát môi trường xung quanh mà không làm lộ vị trí của chính mình. Đây là “đôi mắt và đôi tai” chính của một chiếc tàu ngầm khi đang làm nhiệm vụ.31
*Nhược điểm:
– Phụ thuộc vào mục tiêu: Không thể phát hiện các mục tiêu hoàn toàn im lặng hoặc đang trôi dạt.
– Đo khoảng cách khó khăn: Việc xác định khoảng cách đến mục tiêu là một thách thức lớn. Các phương pháp phổ biến bao gồm giao hội (triangulation) bằng cách sử dụng nhiều mảng nghe ở các vị trí khác nhau, hoặc thực hiện một quy trình phức tạp gọi là Tác nghiệp chuyển động của mục tiêu TMA (Target Motion Analysis), trong đó người vận hành phải theo dõi sự thay đổi phương vị của mục tiêu theo thời gian để ước tính quỹ đạo và khoảng cách của nó.
– Phân loại và nhận dạng: Việc phân loại mục tiêu (ví dụ, xác định đó là loại tàu ngầm nào) đòi hỏi người vận hành phải có kinh nghiệm dày dặn và một cơ sở dữ liệu lớn về “dấu hiệu âm thanh” (acoustic signatures) của các loại tàu khác nhau.
Cuộc đối đầu chiến thuật giữa các lực lượng hải quân, đặc biệt là giữa các tàu ngầm, là một trò chơi “mèo vờn chuột” phức tạp xoay quanh việc sử dụng SONAR chủ động và bị động. Một tàu ngầm thường ưu tiên sử dụng SONAR bị động để duy trì sự bí mật. Điều này thúc đẩy một cuộc chạy đua công nghệ không ngừng nhằm chế tạo ra những chiếc tàu ngầm ngày càng “yên tĩnh” hơn, với các công nghệ như vỏ tàu hấp thụ âm thanh, hệ thống động cơ giảm chấn, và thiết kế chân vịt chống tạo bọt khí. Khi một tàu ngầm đối phương trở nên quá yên tĩnh, nó gần như “tàng hình” đối với SONAR bị động. Lúc này, bên đi săn có thể buộc phải chấp nhận rủi ro, sử dụng SONAR chủ động tần số thấp để “quét” một khu vực rộng lớn, hoặc phối hợp với các phương tiện khác (tàu mặt nước, máy bay) để tạo thành một mạng lưới SONAR song tĩnh/đa tĩnh, nhằm phát hiện mục tiêu mà vẫn bảo vệ được vị trí của chính mình.
Bảng 3: So sánh chi tiết giữa SONAR chủ động và thụ động
| Tiêu chí | SONAR chủ động | SONAR thụ động |
| Nguyên lý hoạt động | Phát xung âm và nhận tiếng vọng | Chỉ lắng nghe âm thanh từ môi trường |
| Khả năng phát hiện | Phát hiện được cả mục tiêu im lặng | Chỉ phát hiện mục tiêu tự phát ra tiếng ồn |
| Đo khoảng cách | Rất chính xác và trực tiếp | Kém chính xác, đòi hỏi phân tích phức tạp (TMA) |
| Tính bí mật | Thấp, dễ bị lộ vị trí | Cao, hoạt động hoàn toàn bí mật |
| Nền tảng sử dụng chính | Tàu mặt nước, máy bay, tàu quét mìn | Tàu ngầm, hệ thống giám sát cố định |
| Nhược điểm chính | Nhiễu dội (reverberation), tiêu thụ nhiều năng lượng | Không phát hiện được mục tiêu im lặng, khó xác định cự ly |
4.3. Các hệ thống SONAR chuyên dụng
Ngoài hai loại hình cơ bản trên, công nghệ SONAR đã phát triển thành nhiều hệ thống chuyên dụng, được tối ưu hóa cho các nhiệm vụ cụ thể:
– Sonar quét mạn SSS (Side-Scan Sonar): Hệ thống này không nhìn về phía trước mà sử dụng các đầu dò phát ra các búp sóng rộng, mỏng như hình rẻ quạt sang hai bên sườn của tàu hoặc thiết bị kéo theo (towfish). Nó ghi lại cường độ của các tín hiệu vọng lại để tạo ra một hình ảnh có độ phân giải cao của địa hình và các vật thể trên đáy biển, tương tự như một bức ảnh chụp từ trên không. SSS là công cụ không thể thiếu trong việc tìm kiếm tàu đắm, đường ống, khảo cổ học dưới nước và đặc biệt là dò mìn.
– Sonar đa tia MBES (Multibeam Echosounder): Thay vì một búp sóng rộng, MBES phát ra và thu nhận hàng trăm búp sóng hẹp, riêng biệt theo một dải hình rẻ quạt vuông góc với hướng di chuyển của tàu. Bằng cách đo chính xác độ sâu và vị trí của hàng trăm điểm trên đáy biển cùng một lúc, MBES có thể tạo ra các bản đồ địa hình 3D (còn gọi là mô hình số độ sâu) với độ chính xác và độ phủ vượt trội.
– Máy dò cá (Fish Finder): Về cơ bản là một hệ thống SONAR chủ động được tối ưu hóa cho ngành thủy sản. Nó sử dụng các tần số và thuật toán xử lý đặc biệt để phát hiện và hiển thị các đàn cá, thường dưới dạng các biểu tượng trên màn hình. Các hệ thống tiên tiến còn có thể ước tính kích thước, độ sâu, thậm chí cả trọng lượng của đàn cá và hướng di chuyển của chúng.
– Máy đo sâu hồi âm (Echosounder): Đây là dạng SONAR đơn giản nhất, thường chỉ phát một búp sóng duy nhất thẳng đứng xuống đáy biển để đo độ sâu tại vị trí ngay bên dưới con tàu.
Phần V
CÁC ỨNG DỤNG THỰC TIỄN
Với khả năng “nhìn” xuyên qua làn nước, công nghệ SONAR đã trở thành một công cụ đa năng, được ứng dụng rộng rãi trong ba lĩnh vực chính: quân sự, dân sự – thương mại, và nghiên cứu khoa học.
5.1. Trong lĩnh vực quân sự
Ứng dụng quân sự là động lực ban đầu và vẫn là lĩnh vực phát triển tiên tiến nhất của công nghệ SONAR.
– Tác chiến chống ngầm ASW (Anti-Submarine Warfare): Đây là ứng dụng quan trọng và mang tính sống còn nhất. Các tàu chiến mặt nước (như tàu khu trục, tàu hộ vệ), máy bay tuần thám biển và chính các tàu ngầm đều được trang bị những hệ thống SONAR phức tạp để phát hiện, định vị, theo dõi và tấn công tàu ngầm đối phương.
– Rà phá thủy lôi (Mine Countermeasures): Các hệ thống SONAR có độ phân giải cao, đặc biệt là Sonar quét mạn, được sử dụng trên các tàu quét mìn hoặc các phương tiện tự hành dưới nước (AUV) để tìm kiếm, phân loại và hỗ trợ vô hiệu hóa các loại mìn và thủy lôi, đảm bảo an toàn cho các tuyến hàng hải quân sự và dân sự.
– Bảo vệ căn cứ và an ninh hàng hải: Các hệ thống SONAR cố định được lắp đặt dưới đáy biển xung quanh các căn cứ hải quân, cảng biển quan trọng, hoặc các hệ thống di động trên tàu tuần tra để giám sát và phát hiện các hoạt động xâm nhập bất hợp pháp dưới nước, như người nhái hoặc tàu ngầm mini của đối phương.
– Tìm kiếm cứu nạn: SONAR được sử dụng để định vị các phương tiện quân sự bị chìm hoặc rơi xuống biển như tàu chiến, máy bay.
– Huấn luyện: Các thiết bị mục tiêu huấn luyện SONAR STT (Sonar Training Target) được phát triển để mô phỏng tín hiệu vọng của một tàu ngầm thực sự, giúp các kíp vận hành SONAR thực hành và nâng cao kỹ năng trong một môi trường an toàn.
5.2. Trong lĩnh vực dân sự và thương mại
Công nghệ SONAR đã được chuyển giao và ứng dụng rộng rãi, mang lại lợi ích kinh tế và xã hội to lớn.
– Ngành thủy sản: Các máy dò cá (fish finder) đã làm thay đổi hoàn toàn ngành đánh bắt. Chúng giúp ngư dân xác định vị trí, độ sâu và kích thước của các đàn cá, từ đó tăng đáng kể hiệu quả khai thác và giảm chi phí nhiên liệu cho việc tìm kiếm.
– An toàn hàng hải: Các máy đo sâu hồi âm là trang bị tiêu chuẩn trên hầu hết các tàu thuyền để đo độ sâu và tránh mắc cạn. Các hệ thống SONAR phức tạp hơn giúp lập bản đồ hải đồ và phát hiện các chướng ngại vật nguy hiểm dưới nước như đá ngầm, xác tàu đắm hoặc các tảng băng trôi.
– Tìm kiếm và cứu nạn (Search and Rescue): SONAR là công cụ chủ lực trong các hoạt động tìm kiếm các phương tiện bị nạn dưới nước như máy bay, tàu thuyền. Các hệ thống SONAR cầm tay, thậm chí tích hợp trí tuệ nhân tạo (AI), đang được phát triển để tăng tốc độ và hiệu quả trong việc xác định vị trí nạn nhân đuối nước.
– Công nghiệp ngoài khơi: Trong ngành dầu khí, SONAR được sử dụng để khảo sát địa hình đáy biển trước khi lắp đặt giàn khoan và đường ống. Nó cũng được dùng để kiểm tra, giám sát định kỳ tình trạng của các đường ống dẫn dầu và khí đốt dưới đáy biển, phát hiện sớm các hư hỏng hoặc rò rỉ tiềm tàng.
– Truyền thông dưới nước: Sóng âm cũng có thể được sử dụng để truyền dữ liệu. Các hệ thống modem âm thanh dưới nước (acoustic modems) sử dụng nguyên lý tương tự SONAR để thiết lập các kênh liên lạc không dây giữa các phương tiện dưới nước, hoặc giữa một phương tiện dưới nước và một trạm trên mặt biển.
5.3. Trong nghiên cứu khoa học
Đối với các nhà khoa học biển, SONAR là một công cụ không thể thiếu, giống như kính viễn vọng đối với các nhà thiên văn học.
– Hải dương học và địa chất biển: Sonar đa tia và sonar quét sườn là những công cụ chính để lập bản đồ chi tiết địa hình đáy đại dương, nghiên cứu các cấu trúc địa chất như núi lửa ngầm, rãnh nứt, và phân tích các lớp trầm tích để hiểu về lịch sử khí hậu của Trái Đất.
– Khảo cổ học dưới nước: SONAR cho phép các nhà khảo cổ “nhìn” xuyên qua lớp bùn cát để phát hiện và khảo sát các di chỉ bị chìm như tàu cổ, các công trình kiến trúc hoặc thậm chí là các thành phố cổ đã bị nhấn chìm, mà không cần phải khai quật tốn kém và có thể gây hư hại.
– Sinh học biển: SONAR bị động được sử dụng để lắng nghe và theo dõi các loài động vật có vú ở biển như cá voi và cá heo, nghiên cứu hành vi giao tiếp và di cư của chúng. SONAR chủ động được dùng để đánh giá sinh khối và sự phân bố của các quần thể cá, phục vụ cho công tác quản lý tài nguyên biển bền vững.
Phần VI
SO SÁNH SONAR VÀ RADAR: HAI CÔNG NGHỆ DÒ TÌM BẰNG SÓNG
Để hiểu rõ hơn bản chất của SONAR, việc so sánh nó với RADAR, một công nghệ dò tìm bằng sóng khác rất phổ biến, là vô cùng hữu ích. Cả hai đều là các hệ thống cảm biến từ xa, hoạt động dựa trên nguyên lý phát sóng và phân tích tín hiệu phản xạ để xác định vị trí, khoảng cách và vận tốc của mục tiêu. Tuy nhiên, chúng hoạt động dựa trên các loại sóng và trong các môi trường hoàn toàn khác nhau.
6.1. Sự khác biệt về nguyên tắc và môi trường hoạt động
Sự khác biệt cơ bản và sâu sắc nhất giữa SONAR và RADAR nằm ở loại sóng mà chúng sử dụng:
– SONAR (Sound Navigation and Ranging) sử dụng sóng âm (acoustic waves), là các sóng cơ học cần một môi trường vật chất (như nước, không khí, chất rắn) để lan truyền.
– RADAR (Radio Detection and Ranging) sử dụng sóng điện từ (electromagnetic waves), cụ thể là sóng radio hoặc vi sóng, có thể lan truyền cả trong môi trường vật chất và trong chân không.
Sự khác biệt về loại sóng này dẫn đến sự khác biệt về môi trường hoạt động tối ưu:
– RADAR hoạt động cực kỳ hiệu quả trong không khí và không gian, nơi sóng điện từ có thể truyền đi rất xa với ít suy hao. Tuy nhiên, khi gặp nước, sóng điện từ bị hấp thụ và suy giảm rất nhanh chóng, khiến RADAR gần như vô dụng trong việc phát hiện các vật thể dưới mặt nước.
– SONAR, ngược lại, được thiết kế để hoạt động trong môi trường nước, nơi sóng âm lan truyền hiệu quả hơn nhiều so với trong không khí. Mặc dù SONAR có thể hoạt động trong không khí (ví dụ như cảm biến siêu âm cho robot), phạm vi của nó rất hạn chế.
Một khác biệt quan trọng khác là tốc độ truyền sóng. Sóng RADAR lan truyền với tốc độ ánh sáng, xấp xỉ 3 x 108 m/s. Trong khi đó, sóng SONAR lan truyền với tốc độ âm thanh trong nước, chỉ khoảng 1,5 x 103 m/s, chậm hơn hàng trăm nghìn lần. Sự chênh lệch khổng lồ về tốc độ này tạo ra những hệ quả sâu sắc về thời gian phản hồi và phạm vi hoạt động. RADAR có thể quét các mục tiêu ở rất xa (hàng nghìn km) và nhận được tín hiệu phản hồi gần như tức thời, lý tưởng cho các ứng dụng đòi hỏi cảnh báo sớm như trong hàng không hoặc phòng thủ tên lửa. Ngược lại, SONAR có một độ trễ thời gian đáng kể. Để một xung âm đi ra xa 15 km và quay trở lại, nó mất tới 20 giây. Trong khoảng thời gian đó, một mục tiêu di động nhanh đã có thể thay đổi vị trí đáng kể. Điều này đòi hỏi các hệ thống SONAR phải có những thuật toán theo dõi và dự đoán phức tạp hơn nhiều để bù đắp cho độ trễ này.
6.2. Phân tích so sánh về hiệu suất và ứng dụng
Từ những khác biệt cơ bản trên, ta có thể rút ra một bảng so sánh toàn diện về hiệu suất và lĩnh vực ứng dụng đặc thù của mỗi công nghệ.
Bảng 4: Bảng so sánh toàn diện SONAR và RADAR
| Tiêu chí | SONAR | RADAR |
| Tên đầy đủ | Sound Navigation and Ranging | Radio Detection and Ranging |
| Loại sóng | Sóng âm (acoustic wave) | Sóng điện từ (electromagnetic wave) |
| Môi trường hoạt động chính | Nước | Không khí, không gian |
| Tốc độ sóng (xấp xỉ) | 1.500 m/s (trong nước) | 300.000.000 m/s (trong không khí) |
| Dải tần điển hình | 1 kHz – 100 kHz | 400 MHz – 36 GHz |
| Phạm vi hoạt động tối đa | Thấp hơn (ví dụ: ~400 km) | Cao hơn (ví dụ: >3.000 km) |
| Ảnh hưởng bởi môi trường | Bị ảnh hưởng mạnh bởi nhiệt độ, độ mặn, áp suất nước (thermocline). | Bị ảnh hưởng bởi điều kiện khí quyển (mưa, sương mù) nhưng ít hơn so với SONAR. |
| Ứng dụng chính | Tác chiến chống ngầm, dò mìn, lập bản đồ đáy biển, dò tìm đàn cá, khảo sát địa chất. | Điều khiển không lưu, dự báo thời tiết, dẫn đường tên lửa, hàng hải (trên mặt nước), giám sát không gian. |
Tóm lại, SONAR và RADAR là hai công nghệ bổ sung cho nhau chứ không phải cạnh tranh với nhau. Mỗi công nghệ được sinh ra để giải quyết bài toán dò tìm và định vị trong một môi trường vật lý riêng biệt. SONAR là công cụ của thế giới dưới nước, trong khi RADAR là công cụ của thế giới trên mặt nước và trong bầu khí quyển. Sự tồn tại song song của chúng là một minh chứng rõ ràng cho việc các giải pháp công nghệ luôn phải được định hình và tối ưu hóa dựa trên các định luật và ràng buộc của thế giới vật lý./.
Phụ lục VIẾT TẮT
| Viết tắt | Tiếng Anh | Dịch nghĩa tiếng Việt |
| AG | Array Gain | Độ lợi mảng |
| AI | Artificial Intelligence | Trí tuệ nhân tạo |
| ASDIC | Allied Submarine Detection Investigation Committee | Dịch nghĩa: Ủy ban điều tra phát hiện tàu ngầm đồng minh (Sonar thế hệ đầu tiên) |
| ASW | Anti-Submarine Warfare | Tác chiến chống ngầm |
| AUV | Autonomous Underwater Vehicle | Phương tiện tự hành dưới nước |
| CTD | Conductivity, Temperature, Depth | Độ dẫn điện, Nhiệt độ, Độ sâu |
| DSP | Digital Signal Processor | Bộ xử lý tín hiệu số |
| DVLs | Doppler Velocity Logs | Nhật ký vận tốc Doppler |
| MBES | Multibeam Echosounder | Sonar đa tia |
| PVDF | Polyvinylidene fluoride | (Một loại màng mỏng trong chế tạo sonnar |
| PZT | Lead Zirconate Titanate | (Một loại chì để chế tạo khối thu phát của sonar) |
| RADAR | Radio Detection and Ranging | Phát hiện và đo khoảng cách bằng sóng vô tuyến |
| SAR | Search and Rescue | Tìm kiếm và cứu nạn |
| SL | Source Level | Mức nguồn |
| SNR | Signal-to-Noise Ratio | Tỷ lệ tín hiệu trên nhiễu |
| SONAR | SOund Navigation And Ranging | Định vị và đo khoảng cách bằng âm thanh |
| SSS | Side-Scan Sonar | Sonar quét mạn |
| STT | Sonar Training Target | Mục tiêu huấn luyện SONAR |
| SVP | Sound Velocity Profile | Cấu hình vận tốc âm thanh |
| TL | Transmission Loss | Suy hao truyền sóng |
| TS | Target Strength | Sức bền mục tiêu |


